定时器硬件中断
stm32f10x定时器
对于stm32定时器资源十分丰富,以为本人热衷开发机器人,在选择机器人主控芯片时一般喜欢选择有多达14个定时器资源的stm32f407系列,对于只有几个定时器的arduino来说优秀了太多,利用好了可以实现确定时间间隔的做某件事情,多个定时器中断可以用来做多件事情,不使用延时也能够将程序实现,而且更快,更灵敏。一般我喜欢在裸机开发的时候使用多个定时器进行传感器采集,pid运算等。
stm32定时器中断周期计算公式
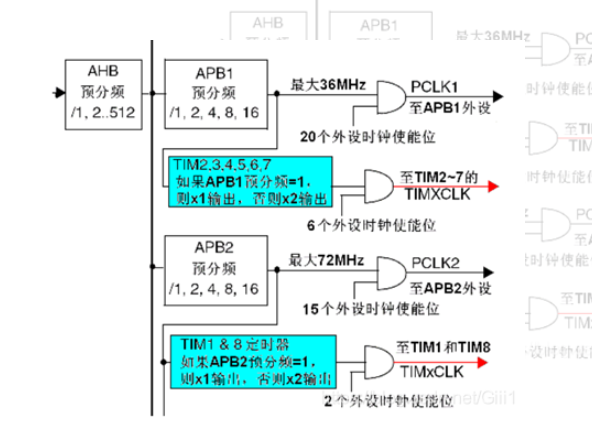
当 APB1 的时钟分频数为 1 的时候,TIM2~7 以及 TIM12~14 的时钟为APB1 的时钟, 而如果 APB1 的时钟分频数不为 1,那么 TIM2~7 以及 TIM12~14 的时钟频率将为 APB1 时钟的两倍
STM32代码配置
定时器配置
void tim_Init(void)
{
TIM_TimeBaseInitTypeDef timInitStructure;
NVIC_InitTypeDef nvicInitStructure;
//1.配置定时器时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
//2.配置定时器结构体
timInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
timInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
timInitStructure.TIM_Period = 10000-1;
timInitStructure.TIM_Prescaler = 7200-1;
TIM_TimeBaseInit(TIM3, &timInitStructure);
//3.开启定时器中断
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM3, ENABLE);
//4.配置中断结构体
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
nvicInitStructure.NVIC_IRQChannel = TIM3_IRQn;
nvicInitStructure.NVIC_IRQChannelPreemptionPriority = 1;
nvicInitStructure.NVIC_IRQChannelSubPriority = 1;
nvicInitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&nvicInitStructure);
//5.搭建定时器中断服务函数
}
void TIM3_IRQHandler(void)
{
}
注意事项
第一:定时中断函数中尽量不要使用delay函数,容易导致卡中断,触发看门狗。
第二:在用多个定时器注意,不同中断优先级的配置,对于一些需要高优先级的中断函数(例如PID运算)应该尽量保证最高优先级
第三:对于中断函数中的变量如果需要全局使用尽量加上volatile关键字。
该关键字主要用于
1.并行设备的硬件寄存器。存储器映射的硬件寄存器通常加volatile,因为寄存器随时可以被外设硬件修改。当声明指向设备寄存器的指针时一定要用volatile,它会告诉编译器不要对存储在这个地址的数据进行假设。
2.一个中断服务程序中修改的供其他程序检测的变量。volatile提醒编译器,它后面所定义的变量随时都有可能改变。因此编译后的程序每次需要存储或读取这个变量的时候,都会直接从变量地址中读取数据。如果没有volatile关键字,则编译器可能优化读取和存储,可能暂时使用寄存器中的值,如果这个变量由别的程序更新了的话,将出现不一致的现象。
3.多线程应用中被几个任务共享的变量。单地说就是防止编译器对代码进行优化.