RT-thread中得SPI与CAN的使用
RT-thread中spi使用
使用STM32F103C8T6配合RT-thread Studio输出spi与can信号,在通过逻辑分析仪解码
spi介绍
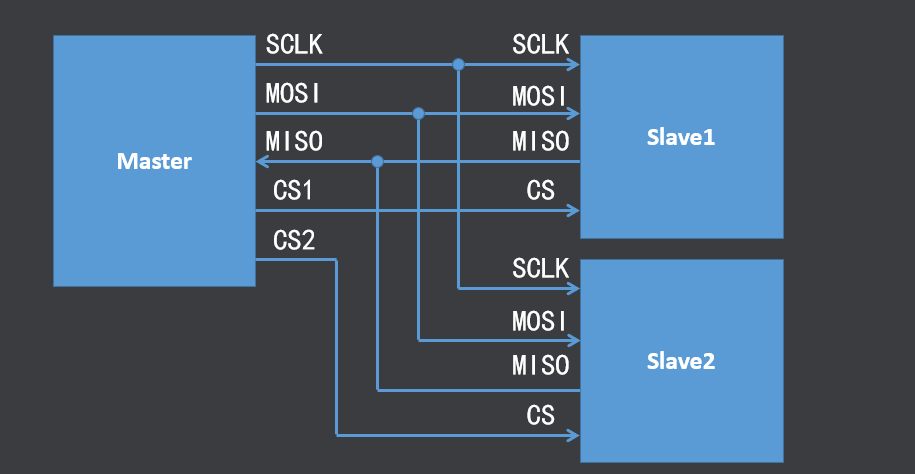
SPI(Serial Peripheral Interface)是串行外设接口的缩写,SPI是一种高速的、全双工、同步的串行通信总线;SPI采用主从方式工作,一般有一个主设备和一个或多个从设备; SPI需要至少4根线,分别是MISO(主设备输入从设备输出)、MOSI(主设备输出从设备输入)、SCLK(时钟)、CS(片选)SPI使用引脚较少且布线方便,所以越来越多的芯片集成了这种通信协议;
当主设备要和某个从设备进行通信时,主设备需要先向对应从设备的片选线上发送使能信号(高电平或者低电平,根据从机而定)表示选中该从设备
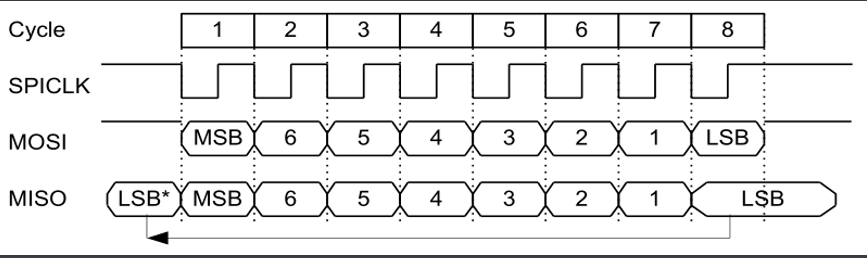
 SPI总线在进行数据传送时,先传送高位,后传送低位;数据线为高电平表示逻辑‘1’,低电平表示逻辑‘0’;一个字节传送完成后无需应答即可开始下一个字节的传送; SPI总线采用同步方式工作,时钟线在上升沿或下降沿时发送器向数据线上发送数据,在紧接着的下降沿或上升沿时接收器从数据线上读取数据,完成一位数据传送,八个时钟周期即可完成一个字节数据的传送;
SPI总线在进行数据传送时,先传送高位,后传送低位;数据线为高电平表示逻辑‘1’,低电平表示逻辑‘0’;一个字节传送完成后无需应答即可开始下一个字节的传送; SPI总线采用同步方式工作,时钟线在上升沿或下降沿时发送器向数据线上发送数据,在紧接着的下降沿或上升沿时接收器从数据线上读取数据,完成一位数据传送,八个时钟周期即可完成一个字节数据的传送;
RT-thread Studio中spi使用
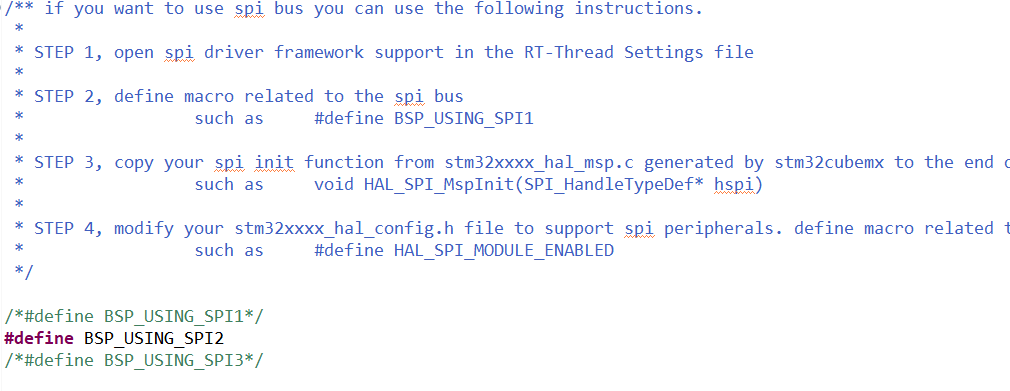
1.在borad.h中打开BSP_USING_SPI2并按照上面步骤部署spi驱动
2.在RT-thread Setting 中打开spi驱动
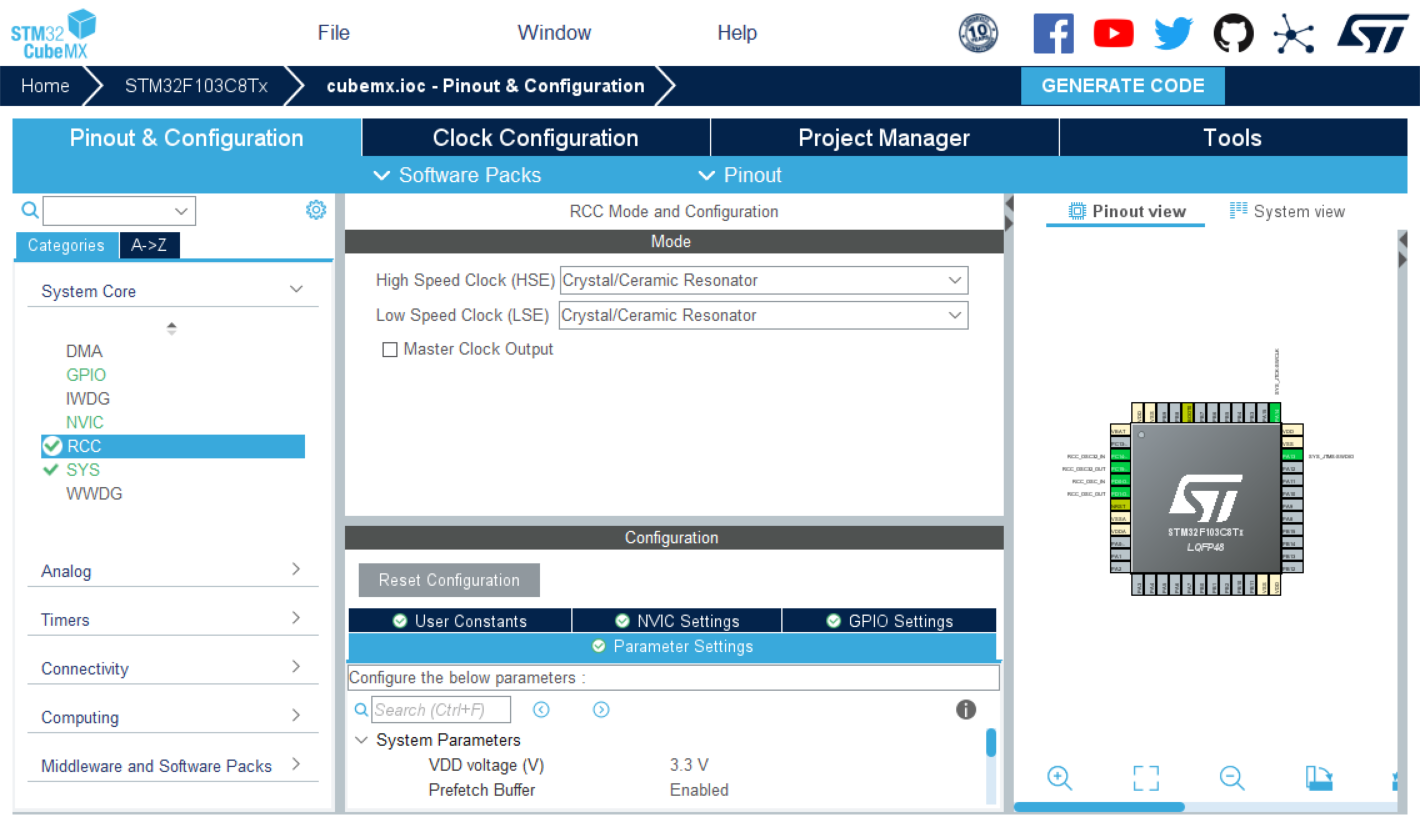
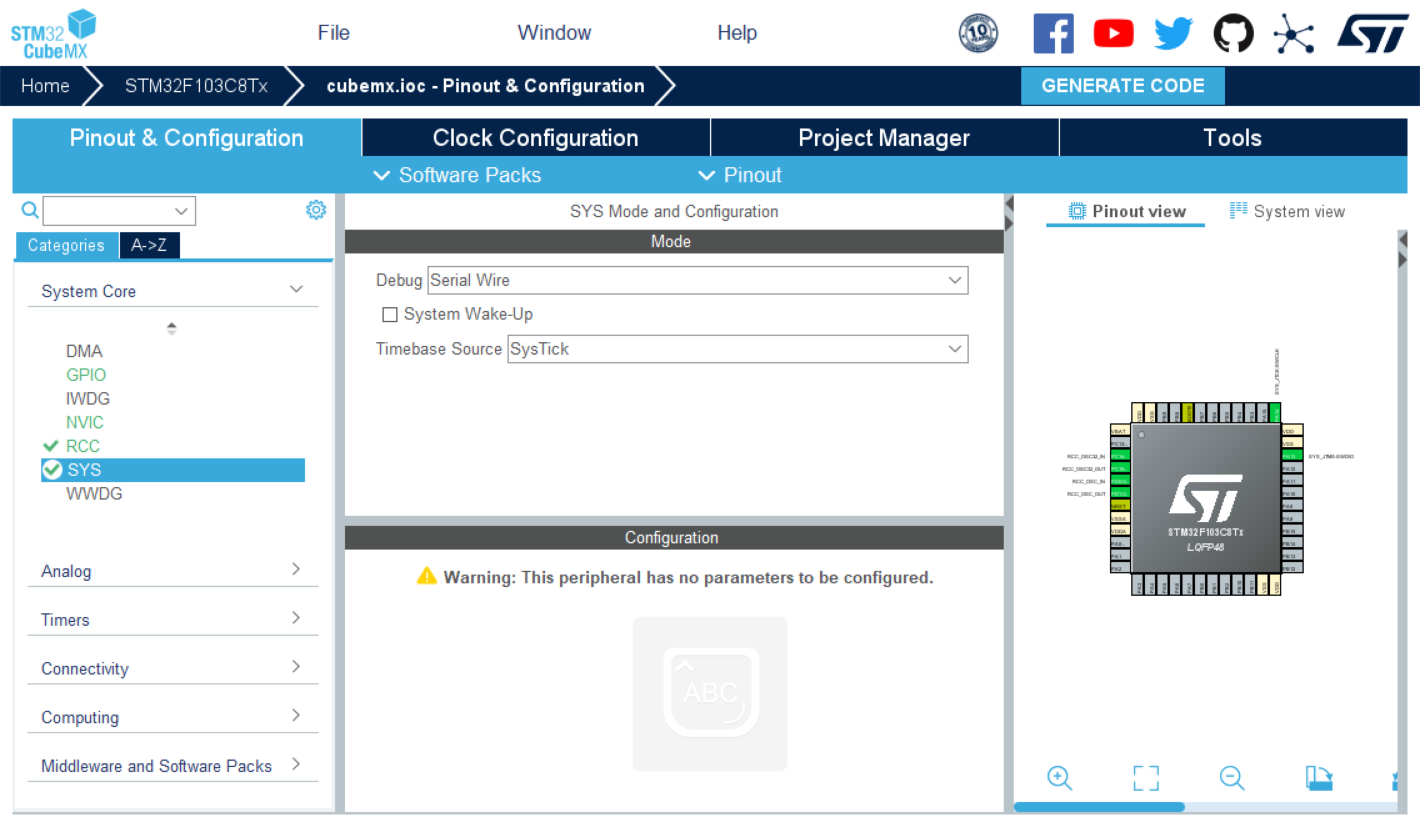
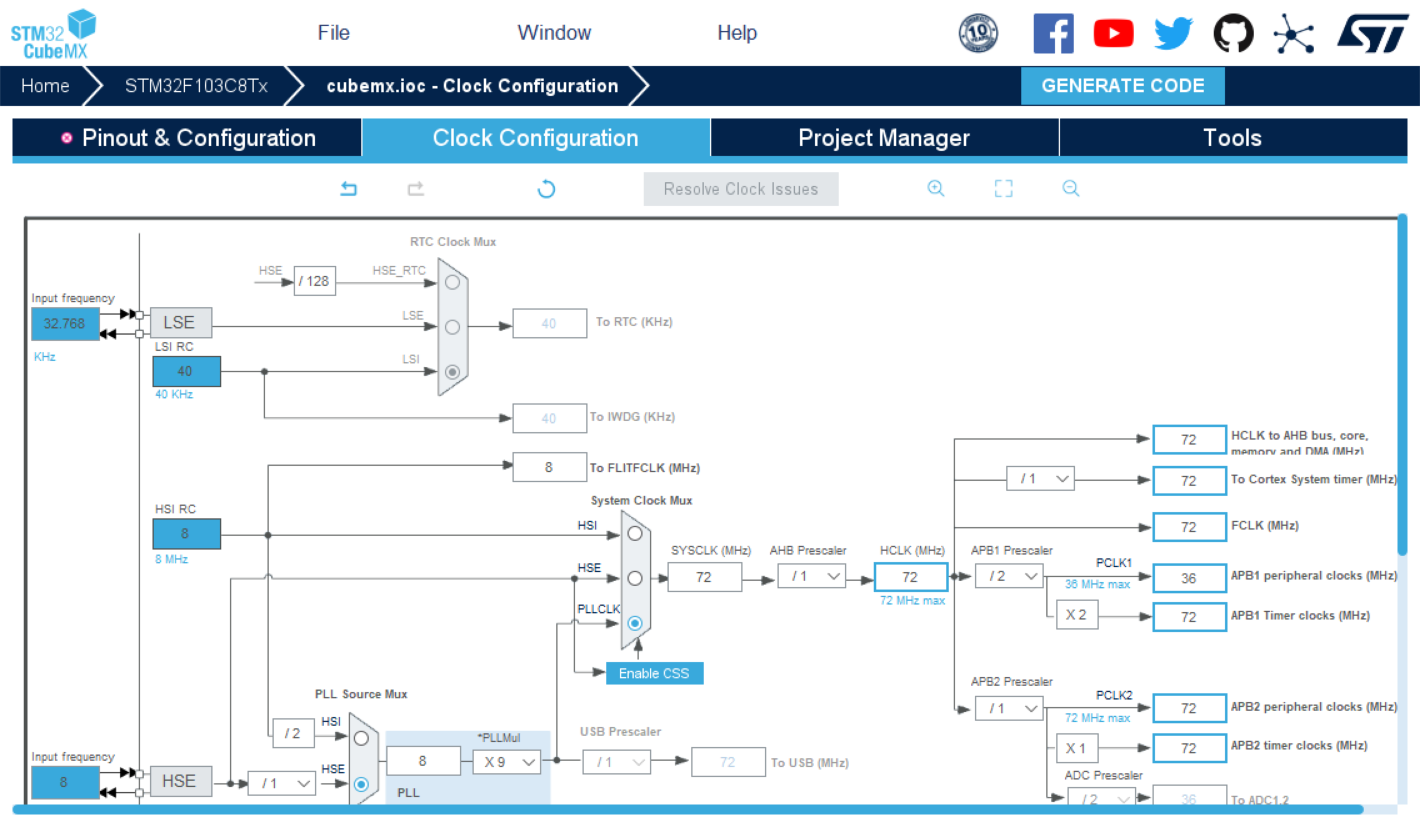
3.配置好stm32CubeMax中spi,时钟,串口等。将Hal库配置代码黏贴到borad.c中。
void system_clock_config(int target_freq_Mhz)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* hspi)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(hspi->Instance==SPI2)
{
/* USER CODE BEGIN SPI2_MspInit 0 */
//
/* USER CODE END SPI2_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_SPI2_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**SPI2 GPIO Configuration
PB13 ------> SPI2_SCK
PB14 ------> SPI2_MISO
PB15 ------> SPI2_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_14;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN SPI2_MspInit 1 */
//
/* USER CODE END SPI2_MspInit 1 */
}
}
4.若出现重定义报错冲突将stm32f1xx_hal_msp.c中代码注释,或者在stm32f1xx_hal_conf.h打开SPI使能.
5.在main.c中添加spi句柄配置与使用,请注意笔者使用的从设备是逻辑分析仪,在spi主设备发送信号之前要手动拉低cs引脚
#include <rtdevice.h>
#include <drv_spi.h>
#define css GET_PIN(B,12)
#define BME280_SPI_DEVICE_NAME "spi20"
#define BEM280_REG_ID 0XD5
rt_bool_t initialnized = RT_FALSE;
static void spi_bme280_demo(void)
{
uint8_t data = BEM280_REG_ID | (1 << 7);
rt_err_t err;
struct rt_spi_device * spi_bme280;
if (!initialnized) {
initialnized = RT_TRUE;
err = rt_hw_spi_device_attach("spi2", BME280_SPI_DEVICE_NAME, GPIOB, GPIO_PIN_12);
if (err) {
rt_kprintf("attach device error\r\n");
return ;
}
}
spi_bme280 = (struct rt_spi_device *)rt_device_find(BME280_SPI_DEVICE_NAME);
if (spi_bme280 == RT_NULL) {
rt_kprintf("find %s error\r\n", BME280_SPI_DEVICE_NAME);
return ;
}
struct rt_spi_configuration cfg = {
.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB,
.data_width = 8,
.max_hz = 1 * 1000 * 1000
};
err = rt_spi_configure(spi_bme280, &cfg);
if (err != RT_NULL) {
rt_kprintf("spi configurate error\r\n");
return ;
}
uint8_t send_buf[5] = {data, 0xff};
uint8_t recv_buf[5];
rt_pin_write(css, PIN_LOW);
if (rt_spi_transfer(spi_bme280, send_buf, recv_buf, 2) == 0) {
rt_kprintf("spi transfer error\r\n");
}
rt_kprintf("bme280 id: 0x%02x\r\n", recv_buf[1]);
}
MSH_CMD_EXPORT(spi_bme280_demo, read bme280 id);
RT-thread Studio中CAN使用
PS:有关can协议的具体详解,请看笔者其他专栏。在进行RT-thread中使用can时要注意硬件条件,及波特率。否则会出现can设备句柄无法打开的情况。
1.在borad.h中添加 #define BSP_USING_CAN及#define BSP_USING_CAN1
2.在在RT-thread Setting 中打开CAN驱动,并在stm32f1xx_hal_conf.h打开CAN使能.
3.配置好stm32CubeMax中CAN,时钟,串口等。将Hal库配置代码黏贴到borad.c中,特别注意最好另外打开cubemax生成代码。
4.在main.c中添加代码
#include <rtthread.h>
#include "rtdevice.h"
#define CAN_DEV_NAME "can1"
static struct rt_semaphore rx_sem;
static rt_device_t can_dev;
/* 接收数据回调函数 */
static rt_err_t can_rx_call(rt_device_t dev, rt_size_t size)
{
/* CAN 接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void can_rx_thread(void *parameter)
{
int i;
rt_err_t res;
struct rt_can_msg rxmsg = {0};
/* 设置接收回调函数 */
rt_device_set_rx_indicate(can_dev, can_rx_call);
while (1)
{
/* hdr 值为 - 1,表示直接从 uselist 链表读取数据 */
rxmsg.hdr = -1;
/* 阻塞等待接收信号量 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
/* 从 CAN 读取一帧数据 */
rt_device_read(can_dev, 0, &rxmsg, sizeof(rxmsg));
/* 打印数据 ID 及内容 */
rt_kprintf("ID:%x", rxmsg.id);
for (i = 0; i < 8; i++)
{
rt_kprintf("%2x", rxmsg.data[i]);
}
rt_kprintf("\n");
}
}
int can_sample(int argc, char *argv[])
{
struct rt_can_msg msg = {0};
rt_err_t res;
rt_size_t size;
rt_thread_t thread;
char can_name[RT_NAME_MAX];
if (argc == 2)
{
rt_strncpy(can_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(can_name, CAN_DEV_NAME, RT_NAME_MAX);
}
/* 查找 CAN 设备 */
can_dev = rt_device_find(can_name);
if (!can_dev)
{
rt_kprintf("find %s failed!\n", can_name);
return RT_ERROR;
}
/* 初始化 CAN 接收信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及发送方式打开 CAN 设备 */
res = rt_device_open(can_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);
RT_ASSERT(res == RT_EOK);
/* 创建数据接收线程 */
thread = rt_thread_create("can_rx", can_rx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
rt_kprintf("create can_rx thread failed!\n");
}
msg.id = 0x78; /* ID 为 0x78 */
msg.ide = RT_CAN_STDID; /* 标准格式 */
msg.rtr = RT_CAN_DTR; /* 数据帧 */
msg.len = 8; /* 数据长度为 8 */
/* 待发送的 8 字节数据 */
msg.data[0] = 0x00;
msg.data[1] = 0x11;
msg.data[2] = 0x22;
msg.data[3] = 0x33;
msg.data[4] = 0x44;
msg.data[5] = 0x55;
msg.data[6] = 0x66;
msg.data[7] = 0x77;
/* 发送一帧 CAN 数据 */
size = rt_device_write(can_dev, 0, &msg, sizeof(msg));
if (size == 0)
{
rt_kprintf("can dev write data failed!\n");
}
return res;
}
void can_send_test(void)
{
struct rt_can_msg msg = {0};
rt_size_t size;
static rt_uint8_t num = 0;
msg.id = 0x78; /* ID 为 0x78 */
msg.ide = RT_CAN_STDID; /* 标准格式 */
msg.rtr = RT_CAN_DTR; /* 数据帧 */
msg.len = 8; /* 数据长度为 8 */
/* 待发送的 8 字节数据 */
msg.data[0] = 0x00;
msg.data[1] = num++;
msg.data[2] = 0x22;
msg.data[3] = 0x33;
msg.data[4] = num++;
msg.data[5] = 0x55;
msg.data[6] = 0x66;
msg.data[7] = 0x77;
/* 发送一帧 CAN 数据 */
size = rt_device_write(can_dev, 0, &msg, sizeof(msg));
if (size == 0)
{
rt_kprintf("can dev write data failed!\n");
}
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can_sample, can device sample);
MSH_CMD_EXPORT(can_send_test, can send test);